1. 算法思路:
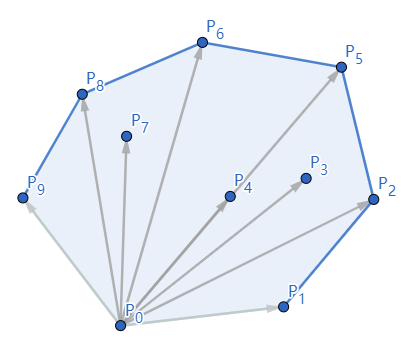
1. 选定y坐标最小(y坐标相同时取x最小)的点作为极点,这个点必在凸包上;
2. 将其余点按极角排序,在极角相同的情况下比较与极点的距离,离极点比较近的优先;
3. 用一个栈 pointStack 存储凸包上的点,先将按极角和极点排序最小的两个点入栈;
4. 按序扫描每个点,检查栈顶的两个元素与这个点构成的折线段是否“拐”向右侧;
( ! isLeftTurn(nextToTop, top, pi) 即 (crossProduct(nextToTop, top, pi) <= 0) )
5. 如果满足,则弹出栈顶元素,并返回第 4. 步再次检查,直至不满足。将该点入栈,并对其余点不断执行此操作;
6. 最终栈中元素为凸包的顶点序列。
时间复杂度 :O(nlogn)
主要花在点集的排序上面,快排平均 O(nlogn)
2. 示例代码:
2.1 极角比较器
使用叉积比较两个点的极角
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
| static class PointComparator implements Comparator<Point> {
private Point p0;
public PointComparator(Point p0) {
this.p0 = p0;
}
@Override
public int compare(Point p1, Point p2) {
double crossProduct = crossProduct(p0, p1, p2);
if (crossProduct > 0) return -1;
if (crossProduct < 0) return 1;
double d1 = p0.dist(p1);
double d2 = p0.dist(p2);
if (d1 < d2) return -1;
if (d1 > d2) return 1;
return 0;
}
}
|
-
crossProduct(p0, p1, p2) > 0 : P0P1×P0P2>0⇒P1<P2
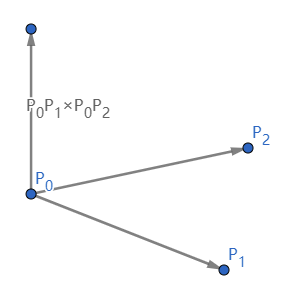
-
crossProduct(p0, p1, p2) < 0 : P0P1×P0P2<0⇒P1>P2
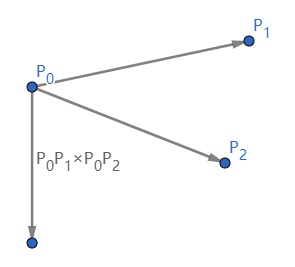
-
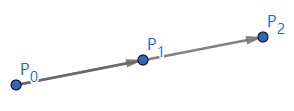
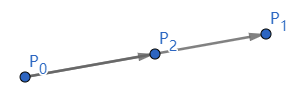
crossProduct(p0, p1, p2) == 0 : P0,P1,P2 三点共线
- ∣P0P1∣<∣P0P2∣⇒P1<P2
- ∣P0P1∣>∣P0P2∣⇒P1>P2
2.2 Graham扫描算法
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
| public static Polygon Graham(ArrayList<Point> pointsList) {
ArrayList<Point> points = (ArrayList<Point>)pointsList.clone();
Stack<Point> pointStack = new Stack<Point>();
Point p0 = getLowestPoint(points);
pointStack.push(p0);
points.remove(p0);
Collections.sort(points, new PointComparator(p0));
Iterator<Point> iter = points.iterator();
Point p1 = iter.next();
pointStack.push(p1);
Point p2 = iter.next();
pointStack.push(p2);
while (iter.hasNext()) {
Point pi = iter.next();
Point top = pointStack.elementAt(pointStack.size() - 1);
Point nextToTop = pointStack.elementAt(pointStack.size() - 2);
while (! isLeftTurn(nextToTop, top, pi)) {
pointStack.pop();
top = nextToTop;
nextToTop = pointStack.elementAt(pointStack.size() - 2);
}
pointStack.push(pi);
}
ArrayList<Point> polygon = new ArrayList<Point>();
while(! pointStack.empty()) {
polygon.add(pointStack.pop());
}
Collections.reverse(polygon);
return new Polygon(polygon);
}
|
-
找最低点 P0,进行排序
-
具体步骤
| points |
pointStack |
|
| P0,P1,P2,P3,P4,P5,P6,P7,P8,P9 |
|
|
| P1,P2,P3,P4,P5,P6,P7,P8,P9 |
P0 |
|
| P3,P4,P5,P6,P7,P8,P9 |
P0,P1,P2 |
|
| P4,P5,P6,P7,P8,P9 |
P0,P1,P2,P3 |
P1P2 到 P1P3 左转,P3 压入 |
| P5,P6,P7,P8,P9 |
P0,P1,P2,P3,P4 |
P2P3 到 P2P4 左转,P4 压入 |
| P5,P6,P7,P8,P9 |
P0,P1,P2,P3 ( P4 ) |
P3P4 到 P3P5 右转,P4 弹出 |
| P5,P6,P7,P8,P9 |
P0,P1,P2 ( P3 ) |
P2P3 到 P2P5 右转,P3 弹出 |
| P6,P7,P8,P9 |
P0,P1,P2,P5 |
P1P2 到 P1P5 左转,P5 压入 |
| P7,P8,P9 |
P0,P1,P2,P5,P6 |
P2P5 到 P2P6 左转,P6 压入 |
| P8,P9 |
P0,P1,P2,P5,P6,P7 |
P5P6 到 P5P7 左转,P7 压入 |
| P8,P9 |
P0,P1,P2,P5,P6 ( P7 ) |
P6P7 到 P6P8 右转,P7 弹出 |
| P9 |
P0,P1,P2,P5,P6,P8 |
P5P6 到 P5P8 左转,P8 压入 |
|
P0,P1,P2,P5,P6,P8,P9 |
P6P8 到 P6P9 左转,P9 压入 |
2.3 其他方法
2.3.1 叉积
1
2
3
4
5
6
7
8
9
10
|
private static double crossProduct(Point p0, Point p1, Point p2) {
return (p1.getX() - p0.getX()) * (p2.getY() - p0.getY()) -
(p2.getX() - p0.getX()) * (p1.getY() - p0.getY());
}
private static boolean isLeftTurn(Point p0, Point p1, Point p2) {
return (crossProduct(p0, p1, p2) > 0);
}
|
P0P1×P0P2
2.3.2 获得最低点
lowest-then-leftmost point(LTL)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| private static Point getLowestPoint(ArrayList<Point> points) {
Point result = points.get(0);
Point candidate;
for (int i = 1; i < points.size(); i++) {
candidate = points.get(i);
if (candidate.getY() < result.getY() ||
candidate.getY() == result.getY() && candidate.getX() < result.getX()) {
result = candidate;
}
}
return result;
}
|