1. 向量的属性
向量拥有两个属性:
- 方向
- 长度 - 向量的模:∥a∥
- 单位向量: a^=∥a∥a(该方向上的单位向量)
2. 向量的表示方法
AB=B−A
a=(xa,ya,za)
a=⎝⎛xayaza⎠⎞
NOTE:
- 行向量表示与列向量表示是有区别的:
尤其是在矩阵变换中,对于某一种变换来说,行向量表示的矩阵跟列向量表示的矩阵是不同的,二者互为转置
Mrow=⎝⎛xaxbxcyaybyczazbzc⎠⎞⟷Mcol=⎝⎛xayazaxbybzbxcyczc⎠⎞
3. 位置与位移
-
位置:
- 表示的是一种静态的状态;
- 当用向量表示位置时,此时向量表示的是一个“点”,而该点的坐标就是原点进行向量表示的位移之后所在的地方。即描述 位置 实际上就是描述相对于给定参考点(通常是坐标系的原点)的 位移 。
-
位移:
- 表示的是一种动态的过程;
- 当用向量表示位移时,向量的方向即是位移的方向,向量的长度即是位移的距离。
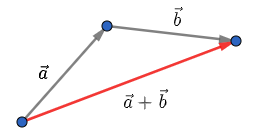
4. 向量的加减
- a+b
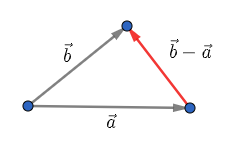
- b−a
5. 点乘
5.1 计算方式
a⋅b=⎝⎛xayaza⎠⎞⋅⎝⎛xbybzb⎠⎞=xaxb+yayb+zazb
5.2 几何意义
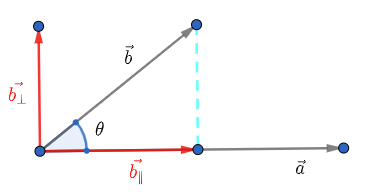
可知:
a⋅b=a⋅b∥
b∥=k⋅a^=∥b∥∥⋅a^=∥b∥⋅cosθ⋅a^
a⋅b=∥a∥∥b∥cosθ
其中:
cosθ=∥a∥∥b∥a⋅b
cosθ=a^⋅b^
特別地:
b=b∥+b⊥
Note :
- 二维空间下,点乘的计算结果是一个标量
- b∥ 为向量 b 在另一个向量 a 上的投影,可以通过点乘计算出某个向量在另一个向量上的投影;
- 当向量 b 点乘的对象是某个单位基向量 e 时,其结果直接就是向量 b 在向量 e 上的投影;
b∥=e⋅b
- 结果中的正负号可判断两条向量方向的 前后关系
- 可以用來评价 两个向量的方向是否接近,即是否趋于 1。
6. 叉乘
6.1 计算方式
a×b=⎝⎛xayaza⎠⎞×⎝⎛xbybzb⎠⎞=⎝⎛yazb−ybzazaxb−zbxaxayb−xbya⎠⎞
6.2 几何意义
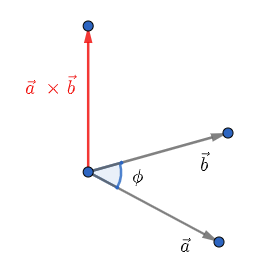
a×b=−b×a
∥a×b∥=∥a∥∥b∥sinϕ
Note :
二维空间下:
- 计算结果理论上是一个向量,结果虽然形式上是一个标量;
- 其数值的大小表示向量的模,正负号表示向量的方向;(右手螺旋定则)
- 通过正负号可判断两条向量的左右关系;
- 两条向量的叉乘实质上是两条向量组成矩阵的行列式,其值是该两条向量确定的平行四边形的面积。
三维空间下:
- 可以通过叉乘计算出任意两条线性无关向量确定的平面的法向量(以右手坐标系为例)
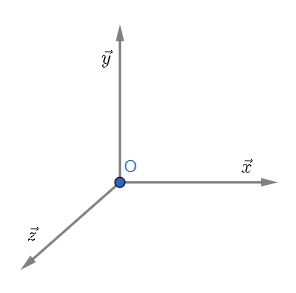
⎩⎪⎨⎪⎧x×y=+zy×z=+xz×x=+y