1. “ heading - pitch - bank ” 约定
欧拉角的基本思想 :将角位移分解为绕三个互相垂直轴的三个旋转组成的序列。
先将物体坐标轴和惯性坐标轴对齐,在标准方位上,让物体依次作 heading , pitch , bank 旋转。
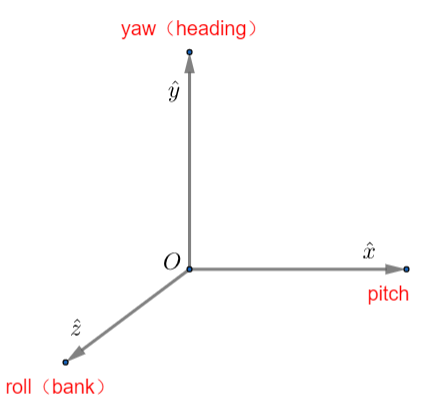
在右手坐标系下:
- heading(航向角) :为绕 y 轴的旋转量,面朝 +y 轴方向,逆时针为正;
- pitch(俯仰角) : 为绕 x 轴的旋转量,面朝 +x 轴方向,逆时针为正(注意该处是物体坐标系的 x 轴,不是惯性坐标系的 x 轴);
- bank(倾斜角) : 为绕 z 轴的旋转量,面朝 +z 轴方向,逆时针为正(注意该处是物体坐标系的 z 轴,不是惯性坐标系的 z 轴)。
NOTE :
- 该处旋转的顺序是 “ heading - pitch - bank ” 时,是指从惯性坐标系到物体坐标系;
- 若从物体坐标系变换到惯性坐标系,旋转的顺序就是相反的。
2. “ roll - pitch - yaw ” 约定
“ roll - pitch - yaw ” 旋转的顺序和 “ heading - pitch - bank ” 的顺序恰好相反。
| roll - pitch - yaw |
heading - pitch - bank |
含 义 |
| roll (翻滚角) |
bank (倾斜角) |
绕 z 轴的旋转量 |
| pitch (俯仰角) |
pitch (俯仰角) |
绕 x 轴的旋转量 |
| yaw (偏航角) |
heading (航向角) |
绕 y 轴的旋转量 |
3. 限制范围
限定一个范围,使得对于任意方位,仅存在一个限制欧拉角能代表这个方位。
| heading - pitch - bank |
含 义 |
取值范围 |
| heading (航向角) |
绕 y 轴的旋转量 |
[−180°,180°] |
| pitch (俯仰角) |
绕 x 轴的旋转量 |
[−90°,90°] |
| bank (倾斜角) |
绕 z 轴的旋转量 |
[−180°,180°] |
4. 万向锁
eg :先 heading=45° 再 pitch=90° ,这与先 pitch=90° 再 bank=45° 是等价的。
- 事实上一旦选择 pitch=±90° ,物体就被限制在只能绕竖直轴旋转。
4.1 万向锁现象 :
角度为 ±90° 的第二次旋转使得第一次和第三次旋转的旋转轴相同。
4.2 消除万向锁 :
- 规定万向锁情况下由 heading 完成绕竖直轴的全部旋转;
- 换言之,在限制欧拉角中,若 pitch=±90° ,则 bank 锁定为零。
5. 欧拉角的插值运算
在方位 A 和 B 间求插值 :
给定参数 t∈[0,1] ,计算临时方位 C ,当 t 从 0 变化到 1 时,C 也平滑地从 A 变化到 B。
该问题的简单解法是分别对三个角度作 标准线性插值 :
⎩⎨⎧Δθ=θ1−θ0θt=θ0+tΔθ
然而以这种方式,即便是限制欧拉角也无法解决某个问题,该问题是由旋转角度的周期性引起的。
例如,A−heading=−170° ,B−heading=170° ,这些值都在 heading 的限制范围内,都在 −180° 到 +180° 之间。
然而这两个值只相差 20° ,这时插值操作发生了错误,因为旋转是沿着“长弧”饶了 340° 而不是更短的 20° 。
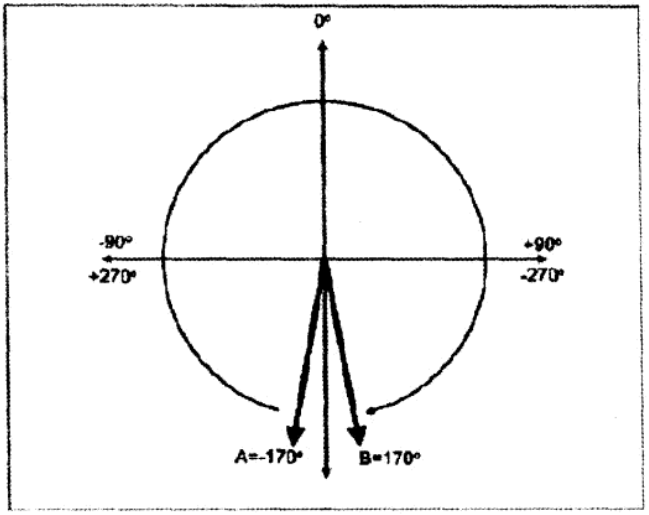
解决方式 :
解决这类问题的方法是将插值的 “ 差 ” 角度折到 −180° 到 +180° 之间,以找到最短弧。
wrap(x)=x−360°⋅⌊(x+180°)/360°⌋
| k 取值范围 |
x 取值范围 |
含 义 |
| k∈Z,k∈[0,+∞) |
x∈[2kπ,π+2kπ) |
x=xmod2π |
| k∈Z,k∈[0,+∞) |
x∈[π+2kπ,2π+2kπ) |
x=(xmod2π)−2π |
| k∈Z,k∈(−∞,0] |
x∈[2kπ−π,2kπ) |
x=xmod2π |
| k∈Z,k∈(−∞,0] |
x∈[2kπ−2π,2kπ−π) |
x=(xmod2π)+2π |

1
2
3
4
5
6
7
8
9
|
float wrapPi(float theta) {
theta += kPi;
theta -= floor(theta * k1Over2Pi) * k2Pi;
theta -= kPi;
return theta;
}
|
即将 标准线性插值 改进如下:
⎩⎨⎧Δθ=wrap(θ1−θ0)θt=θ0+tΔθ
6. 示例代码
6.1 将欧拉角转换到限制集
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
|
void EulerAngles::canonize() {
pitch = wrapPi(pitch);
if (pitch < -kPiOver2) {
pitch = -kPi - pitch;
heading += kPi;
bank += kPi;
}
else if (pitch > kPiOver2) {
pitch = kPi - pitch;
heading += kPi;
bank += kPi;
}
if (fabs(pitch) > kPiOver2 - 1e-4) {
heading += bank;
bank = 0.0f;
}
else {
bank = wrapPi(bank);
}
heading = wrapPi(heading);
}
|
6.1.1 将 pitch 变换到 −2π 到 2π 之间
<1> pitch<−2π :
⎩⎪⎪⎪⎨⎪⎪⎪⎧pitch=−π−pitchheading=heading+πbank=bank+π
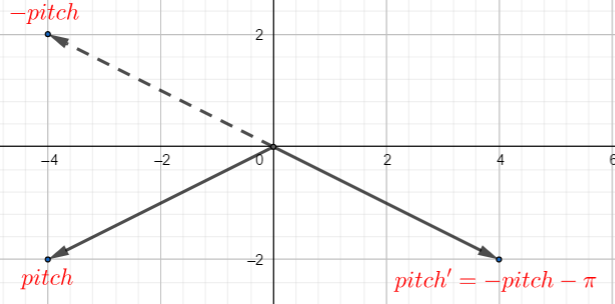
- 将 heading 与 bank 反向
<2> pitch>2π :
⎩⎪⎪⎪⎨⎪⎪⎪⎧pitch=π−pitchheading=heading+πbank=bank+π
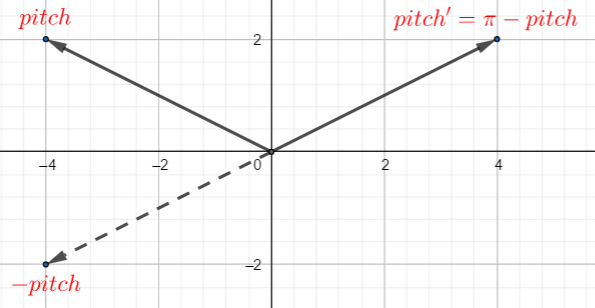
- 将 heading 与 bank 反向
6.1.2 处理万向锁
pitch=±90°:⎩⎨⎧heading=heading+bankbank=0