1. 方位和角位移
我们知道不能用绝对坐标来描述物体的 位置 ,要描述物体的 位置 ,必须把物体放置于特定的参考系中。
描述 位置 实际上就是描述相对于给定参考点(通常是坐标系的原点)的 位移 。
同样,描述物体 方位 时,也不能使用绝对量。
与位置只是相对已知点的位移一样,方位是通过于相对已知方位(通常称为“单位”方位或“源”方位)的旋转来描述的。
- 旋转的量称作角位移。
- 换句话说,在数学上描述 方位 就等价与描述 角位移 。
整理如下:
-
方位:
- 表示的是一种静态的状态;
- 当用矩阵表示方位时,此时矩阵表示的是一个“点”,而该点的坐标就是原点进行矩阵表示的旋转之后所在的地方。即描述 方位 实际上就是描述相对于给定参考点(通常是坐标系的原点)的 角位移 。
-
角位移:
- 表示的是一种动态的过程;
- 当用矩阵表示角位移时,旋转变换的量即是角位移。
具体来说,我们用矩阵和四元数来表示“角位移”,用欧拉角来表示“方位”。
2. 矩阵形式 —— 用矩阵描述旋转变换
3D 中,描述坐标系中 方位 的一种方法就是列出这个坐标系的 基向量 ,而这些基向量是相对于其他坐标系进行描述的。
这些基向量构成一个 3×3 矩阵,然后就能用矩阵形式来描述 方位 。
换言之,能用一个 旋转矩阵 来描述这两个坐标系之间的相对方位,这个旋转矩阵用于把一个坐标系中的向量转换到另一个坐标系中。
3. 基本旋转矩阵
3.1 绕 < 3 - 轴 > 旋转
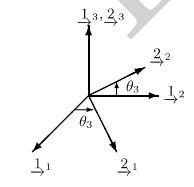
先将 F1 看做基向量空间 I ,可推出:
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧21T=[cosθ3sinθ30]22T=[−sinθ3cosθ30]23T=[001]
可得绕 < 3 - 轴 > 旋转的 旋转矩阵 C3 为:
C3=C21=[212223]=⎣⎢⎢⎢⎡cosθ3sinθ30−sinθ3cosθ30001⎦⎥⎥⎥⎤
由 C21⋅F1=F2 可得:
F1C21F2
即:
C21⋅[111213]=[212223]
3.2 绕 < 2 - 轴 > 旋转
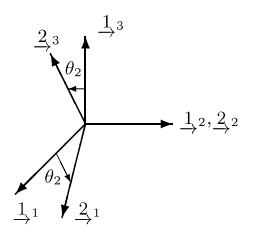
先将 F1 看做基向量空间 I ,可推出:
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧21T=[cosθ20−sinθ2]22T=[010]23T=[sinθ20cosθ2]
可得绕 < 2 - 轴 > 旋转的 旋转矩阵 C2 为:
C2=C21=⎣⎢⎢⎢⎡cosθ20−sinθ2010sinθ20cosθ2⎦⎥⎥⎥⎤
由 C21⋅F1=F2 可得:
F1C21F2
即:
C21⋅[111213]=[212223]
3.3 绕 < 1 - 轴 > 旋转
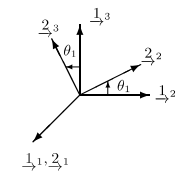
先将 F1 看做基向量空间 I ,可推出:
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧21T=[100]22T=[0cosθ1sinθ1]23T=[0−sinθ1cosθ1]
可得绕 < 1 - 轴 > 旋转的 旋转矩阵 C1 为:
C1=C12=⎣⎢⎢⎢⎡1000cosθ1sinθ10−sinθ1cosθ1⎦⎥⎥⎥⎤
由 C21⋅F1=F2 可得:
F1C21F2
即:
C21⋅[111213]=[212223]